




| VR Simulator for Learning First Aid |
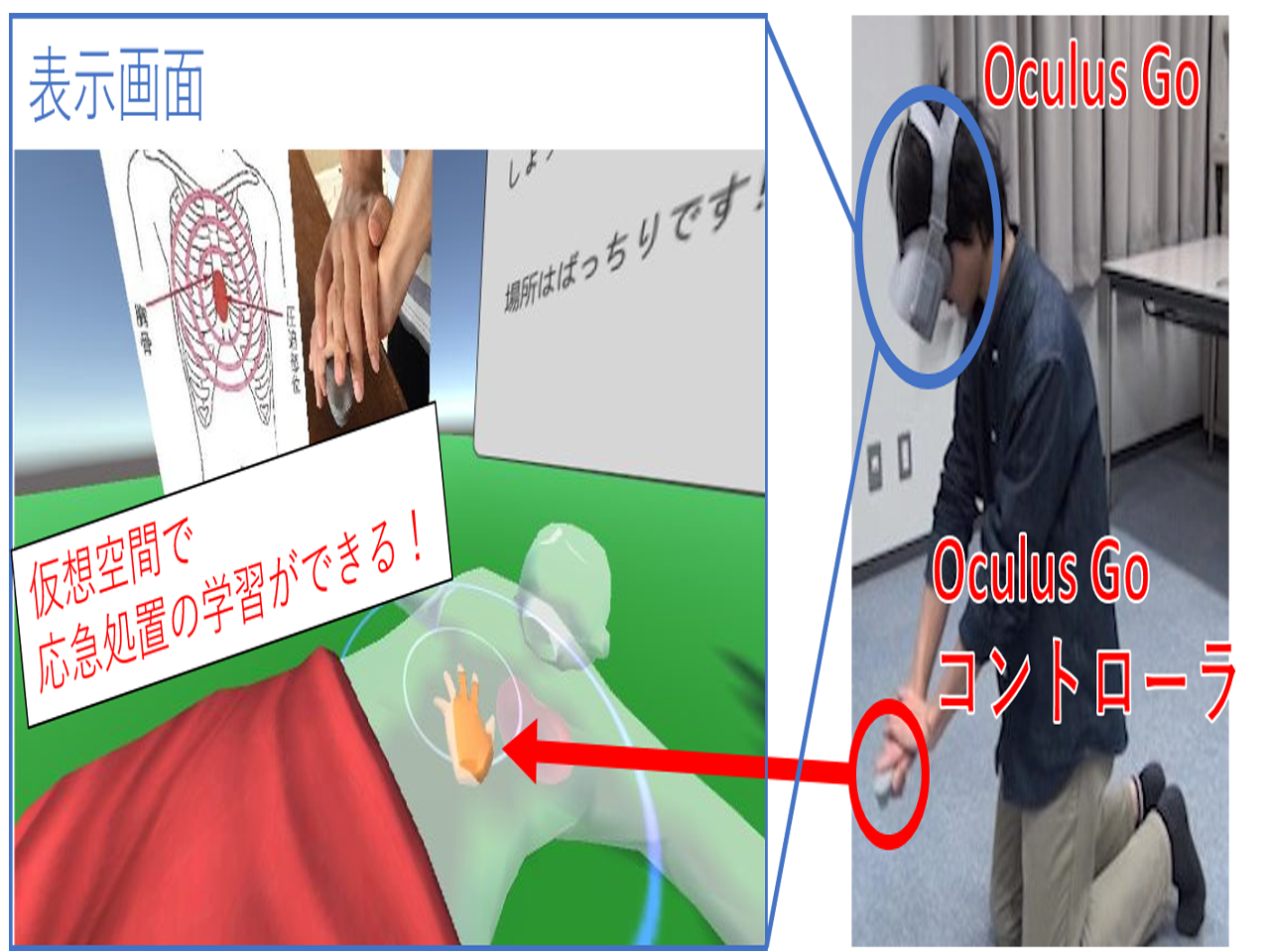
At accident or disaster scenes, few private citizens are qualified to provide first aid before the arrival of rescue workers. Although the worldwide spread of automated external defibrillators (AEDs) has been extensive, they are still not being efficiently utilized. This study proposes a VR simulator through which first aid techniques and its principles can be learned. In our system, users learn how to operate AEDs, for example, compressing the chest during cardiac arrest situations. They virtually provide first aid using an AED on a mannequin by manipulating characters displayed in a virtual space. By pressing the chest during cardiac arrest situations, users can learn correct positions, strength, and tempo. The position is determined by the distance between the hand position and the correct place, and the strength is determined by the acceleration obtained from the controller; the tempo is determined by the motion's cycle. Awareness of first aid can be improved by visual and auditory sensory feedback based on the user's behavior. I evaluated the usefulness of our proposed system with 16 people who used it. About 80% answered that it provided useful opportunities for practicing first aid. However, some feedback described the system's operation as difficult and complained that its sensations differed from the reality of actual first aid situations.
